

As can be seen above this is the coding we ae using to drive our bot within the ring the base of this code is that of a line follower robot as it has to stay within the white circle and not fall off the table that has a black ring around the edge, the code was changed so not it stops when it get the a darker colour instead of following the darker colour like a line follower.
This code was chosen as it was the most effective as we could easily change the speed at which each wheel would have turn depending on what side of the bot enters the darker region first. For example have it working slowly for testing and calibration of the electronic components and then speed it up for competition

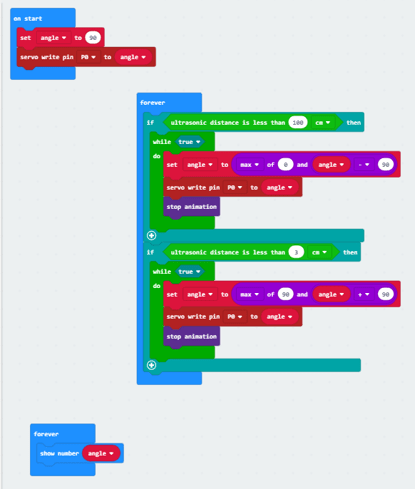
This is the code that we are going to be using for our flipper arm to lift other bots off the ground if they drive up on top of us. It uses a stepper motor fitted to a cam to raise and lower and flap, the servo motor will only have two positions set into it the highest setting to lift and stay up/lift up other bot and the resting position thus is where it will spend much of it time as the flipper will one be engaged as a defence mechanism
